
























انقلاب زیر دریا با باله ماهیتن

برنا - گروه علمی و فناوری: پهپاد جدید با بالهای شبیه ماهی تن، چابکتر از همیشه در اعماق دریا میتازد و آینده اکتشافات زیرآبی را دگرگون میکند.
یک تیم تحقیقاتی از دانشگاه مریلند (UMD) با الهام از نحوه شنا کردن ماهی تن، یک باله رباتیک جدید طراحی کرده است که میتواند عملکرد پهپادهای زیرآبی را بهبود بخشد.
به گزارش اینترستینگ اینجیرینگ، این فناوری جدید با افزایش ۴۹ درصدی مانورپذیری نسبت به پروانههای سنتی، باعث بهبود کنترل نیرو، بازیابی انرژی و استفاده بهینه از جریانهای آبی میشود.
طراحی الهامگرفته از ماهی تن برای بهبود عملکرد پهپادهای زیرآبی
پژوهشگران دانشگاه مریلند با هدف افزایش سرعت و مانورپذیری وسایل نقلیه زیرآبی بدون سرنشین (UUVs)، یک سیستم پیشرانش جدید مبتنی بر باله دم ماهی تن توسعه دادهاند. این فناوری جدید میتواند تحولی در اکتشافات اعماق دریا ایجاد کند و راندمان پهپادهای زیرآبی را نسبت به مدلهای موجود افزایش دهد.
هوئرتاس سردیرا، استادیار مهندسی مکانیک و سرپرست این پروژه، در اینباره گفت: «ما از شناگران زیستی که طی میلیونها سال تکامل یافتهاند و کارایی بیشتری نسبت به سیستمهای دارای پروانه دارند، الهام گرفتهایم. ما نمیتوانیم یک ماهی واقعی بسازیم، اما میتوانیم رباتی طراحی کنیم که مانند ماهی حرکت کند و عملکرد آن را بهینه نماییم.»
چالشهای سیستمهای پیشرانش موجود و راهکار جدید
پهپادهای زیرآبی امروزی عمدتاً از پروانههای سنتی استفاده میکنند که طی قرنها بهینهسازی شدهاند. با این حال، با پیشرفت رباتیک و فناوری خودران، مأموریتهای این وسایل پیچیدهتر شده و نیاز به بهبود در بهرهوری، مانورپذیری و مخفیکاری احساس میشود. از اینرو، دانشمندان به پیشرانشهای زیستالهامگرفته روی آوردهاند، چرا که موجودات دریایی در بسیاری از شاخصهای کلیدی عملکرد بهتری نسبت به سیستمهای ساخت بشر دارند.
با این وجود، سیستمهای زیستی و مکانیکی هر دو در زمینه تعادل بین بهرهوری و مانورپذیری با چالشهایی روبهرو هستند. برای مثال، پهپادهای زیرآبی که وظیفه بررسی و تعمیر زیرساختهای نفتی را بر عهده دارند، باید مسافتهای طولانی را طی کنند و در عین حال موقعیت خود را بهدقت حفظ نمایند. در روشهای متداول کنترل موقعیت، مانند استفاده از بالههای کنترلی، تغییر جهت رانش و رانشگرهای جانبی، مشکلاتی از قبیل افزایش کشش، پیچیدگی و واکنش کند مشاهده میشود.
طراحی باله رباتیک سهبعدی و مزایای آن
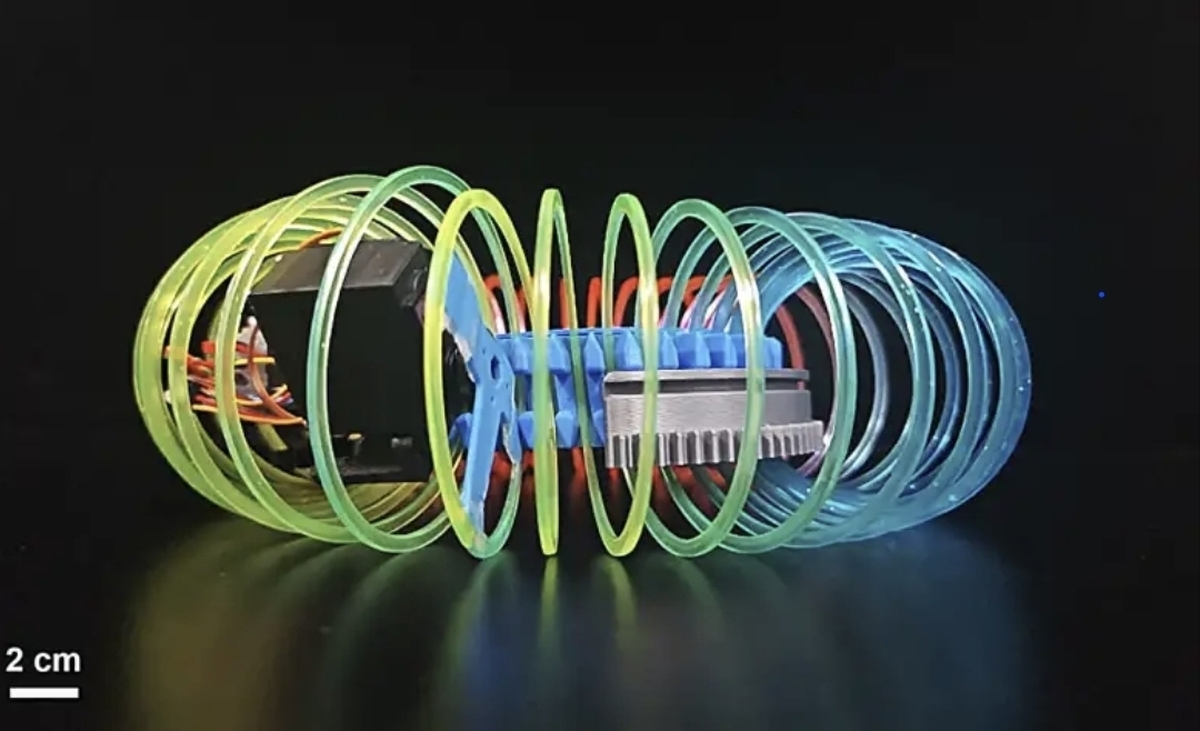
پژوهشگران در این پروژه از ترکیب مفاهیم مهندسی و طبیعت برای توسعه یک سیستم پیشرانش نوین بهره بردهاند. این طراحی جدید بر اساس نحوه شنا کردن ماهیان تن و سایر گونههایی که از روش «شناوری تونفرم» (Thunniform Swimming) استفاده میکنند، ساخته شده است. در این سیستم، یک باله رباتیک با سه درجه آزادی (۳-DOF) طراحی شده که میتواند در سه جهت مختلف حرکت کند.
این باله به دلیل انعطافپذیری بالا، دامنه حرکتی وسیعتری نسبت به بالههای طبیعی و پروانههای امروزی دارد. البته، تعیین الگوی حرکتی دقیق باله برای انجام وظایف خاص، یک چالش بزرگ محسوب میشود. برای حل این مشکل، پژوهشگران از روش دادهمحور استفاده کرده و با انجام آزمایشهای واقعی، الگوهای حرکتی بهینه را شناسایی میکنند. این رویکرد موجب تولید پهپادهای زیرآبی با بهرهوری بالا و چابکی بیشتر خواهد شد.
افزایش کارایی و چابکی پهپادهای زیرآبی
روش شناوری تونفرم تا ۹۰ درصد بهرهوری دارد، در حالی که کارایی پروانههای سنتی حدود ۷۰ درصد است. با این حال، این سبک شنا در سرعتهای پایین با مشکل مانورپذیری مواجه است. طراحی جدید با افزودن بالهای با سه درجه آزادی، این مشکل را حل کرده و امکان انجام حرکات پیچیدهتر از آنچه در طبیعت مشاهده میشود را فراهم میکند.
این باله رباتیک باعث بهبود کنترل جهت نیرو، افزایش کارایی ضربههای بازیابی و استفاده بهینه از نیروهای هیدرودینامیکی ناپایدار میشود. همچنین، حرکات چهارمرحلهای که محققان توسعه دادهاند، حتی از روشهای حرکتی طبیعی مانند پارو زدن حیوانات دریایی و حرکات بال حشرات نیز برتری دارد. مقایسهها نشان میدهد که این فناوری در مقایسه با پروانههای سنتی، ۴۹ درصد افزایش مانورپذیری ایجاد میکند.
اگرچه این سیستم به دلیل طراحی بدنه صلب و باله با نسبت ابعادی بالا ممکن است محدودیتهایی در مانورپذیری ایجاد کند، اما همچنان کارایی بالایی دارد، مقاوم به فشار است و قابلیت حمل محمولههای حساس را دارد. با وجود پیچیدگی و هزینه بالای سیستم، امکان بهینهسازی آن با افزودن بالههای انعطافپذیر برای افزایش کارایی در آینده وجود دارد.
بر اساس این مطالعه، حرکت سهبعدی باله، مانورپذیری را برای طیف وسیعی از طراحیهای باله بهبود میبخشد و میتواند بهعنوان یک رویکرد کارآمد برای توسعه نسل جدید پهپادهای زیرآبی مورد استفاده قرار گیرد.
تیم تحقیقاتی دانشگاه مریلند قصد دارد تا پایان سال جاری نمونه اولیه این باله را ساخته و آن را در تونل آبی آزمایشگاه هیدرودینامیک دانشگاه آزمایش کند. پس از تکمیل پهپاد در دو تا سه سال آینده، آزمایشهای نهایی در آزمایشگاه فناوریهای خودران مریلند در جنوب این ایالت انجام خواهد شد.
انتهای پیام/




نظر شما

پیشنهاد سردبیر












پرونده ویژه







