


























مورچه ها منبع الهام ساخت ربات های گروهی

پژوهشگران دانشگاه هاروارد با الهام از رفتار مورچهها رباتهایی ساختهاند که میتوانند بدون نیاز به برنامه خاصی برای فرار از «زندان» با هم کار کنند.
خبرگزاری برنا- گروه علمی و فناوری؛ اگر یک دسته از مورچه ها را کنار هم قرار دهید میتوانند به چیزهای قابل توجهی دست یابید. با الهام از این رفتار همکاری، پژوهشگران دانشگاه هاروارد رباتهایی ساختهاند که میتوانند بدون نیاز به برنامه خاصی برای فرار از «زندان» با هم کار کنند.
یک کلنی از مورچهها بر اساس الگوریتمهای خاصی رفتار میکنند، مورچهها به طور خاص به یک کار فکر نمیکنند، اما آنها از مجموعهای از قوانین غریزی پیروی میکنند که آنها را به سمت شاهکارهای پیچیده مهندسی، مانند حفر شبکههای تونل یا ساختن پل، راهنمایی میکند. آنها با استفاده از شاخکهای خود و مسیرهای فرمونی خود با یکدیگر ارتباط برقرار میکنند.
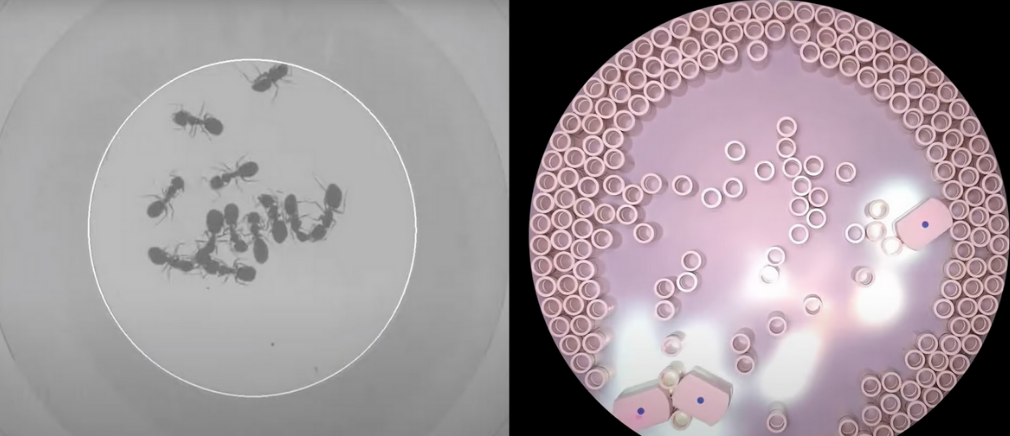
آنان با انجام آزمایشی با قرار دادن گروه کوچکی از مورچهها که در داخل یک تله دایرهای که توسط یک دیوار شنی نرم احاطه شده است، آزمایش خود را شروع کردند تا ببینند چگونه با هم برای فرار کار میکنند. در ابتدا، مورچهها همه به طور تصادفی در اطراف سرگردان بودند، اما پس از گذشت زمانی کوتاه برخی از آنها شروع به حفاری دیوارها در نقاط پراکنده کردند. با گذشت زمان، پژوهشگران متوجه شدند که مورچهها حفاری انفرادی خود را رها کردند و در عوض با هم گروه میشوند تا روی یک تونل کارآمدتر کار کنند، تا اینکه در نهایت موفق شدند بیرون بیایند.
محققان مدلهای ریاضی از آنچه در حال رخ دادن بود ساختند. هنگامی که مورچهها با یکدیگر برخورد میکردند، از طریق شاخکهای خود ارتباط برقرار میکردند. با گذشت زمان، آنها شروع به تمرکز در مناطقی کردند که بیشتر بتوانند با هم تعامل داشته باشند و یک حلقه بازخورد ایجاد کنند. مورچهها در این مکانها بیشتر و بیشتر جمع میشدند. این باعث میشود که آنها تلاش خود را بر حفاری در یک نقطه متمرکز کنند تا بتوانند از آن عبور کنند، نه اینکه هر مورچهای تونل خود را حفر کند.
با استفاده از این مدل، پژوهشگران تصمیم به ساخت رباتهایی کردند که از قوانین مشابه پیروی میکردند. مورچههای رباتیک آنها که آنها را رنت مینامیدند، فرمونهای شیمیایی تولید نمیکردند، بلکه میدانهای نوری یا "فوتورمون ها" را از خود به جای گذاشتند، که هر چه بیشتر رباتها از آنجا عبور میکردند، روشنتر میشدند.
رنتها طوری برنامهریزی شده بودند که از سه قانون ساده پیروی کنند: آنها باید شیب میدان فتورومون را دنبال میکردند، از رباتهای دیگری که در مناطق با چگالی میدان زیاد بودند دوری میکردند، و موانعی را که چگالی آن بالا بود را برمیداشتند و آنها را به مناطق با چگالی کم منتقل میکردند؛ و مطمئناً، این قوانین به رنتها اجازه میداد تا مانند آزمایش مورچهها همکاری کنند. هنگامی که رباتها در اتاقک خود قرار گرفتند و توسط چندین حلقه از موانع کوچک احاطه شدند، رباتها به سرعت متوجه شدند که بهترین طرح فرار این است که با هم کار کنند تا روی یک نقطه تمرکز کنند.
این تکنیک میتواند برای طراحی دستههایی از رباتهای ساده که میتوانند کارهای پیچیده را با همکاری یکدیگر انجام دهند، حیاتی باشد. نمونههای زیادی از رباتهای الهام گرفته از مورچه وجود دارد.
نویسنده ارشد این مطالعه گفت: ما نشان دادیم که چگونه تکمیل مشارکتی وظایف میتواند از قوانین ساده ناشی شود و چنین قوانین رفتاری مشابهی را میتوان برای حل مشکلات پیچیده دیگر مانند ساخت و ساز، جستجو و نجات و دفاع به کار برد.
انتهای پیام/



نظر شما

پیشنهاد سردبیر












پرونده ویژه







