


























کوچکترین ربات پرنده بیسیم جهان پرواز کرد
برنا - گروه علمی و فناوری: محققان از ساخت ربات پرندهای بهاندازه کمتر از یک سانتیمتر خبر دادند که با الهام از زنبور عسل، قابلیت پرواز کنترلشده و هدفگیری دقیق را دارد.
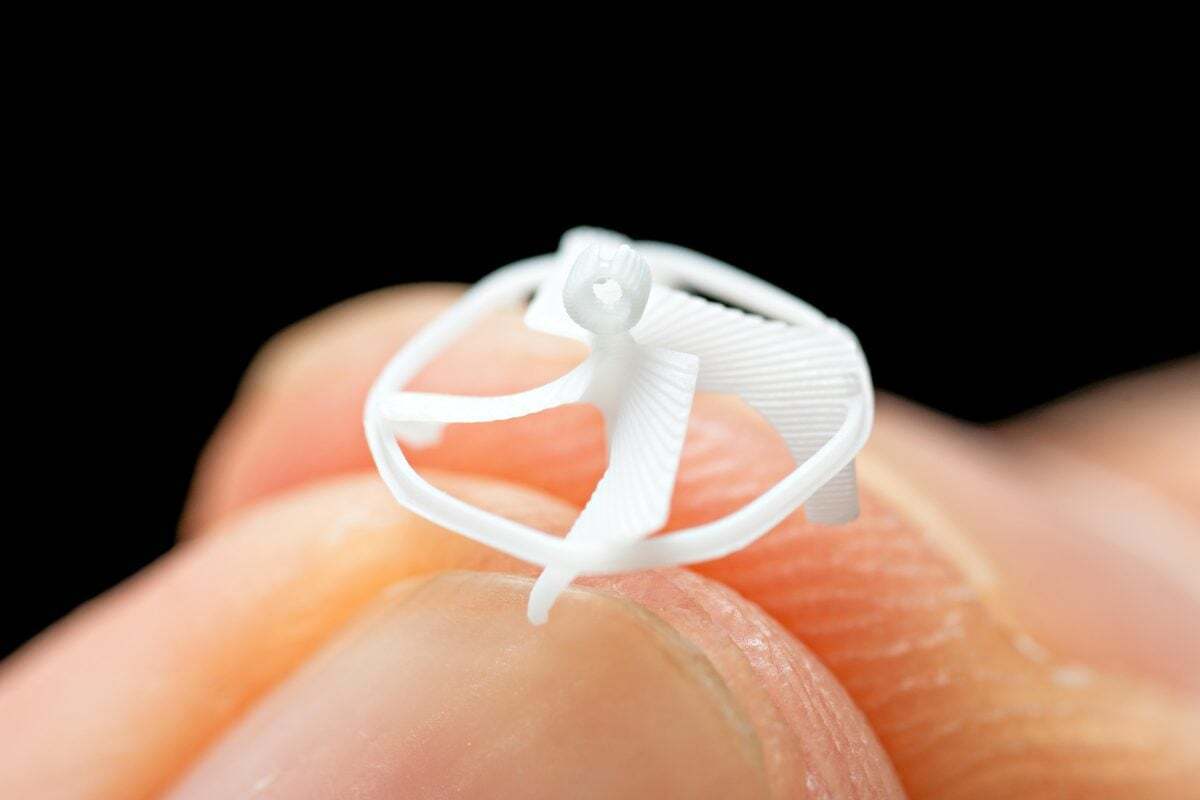
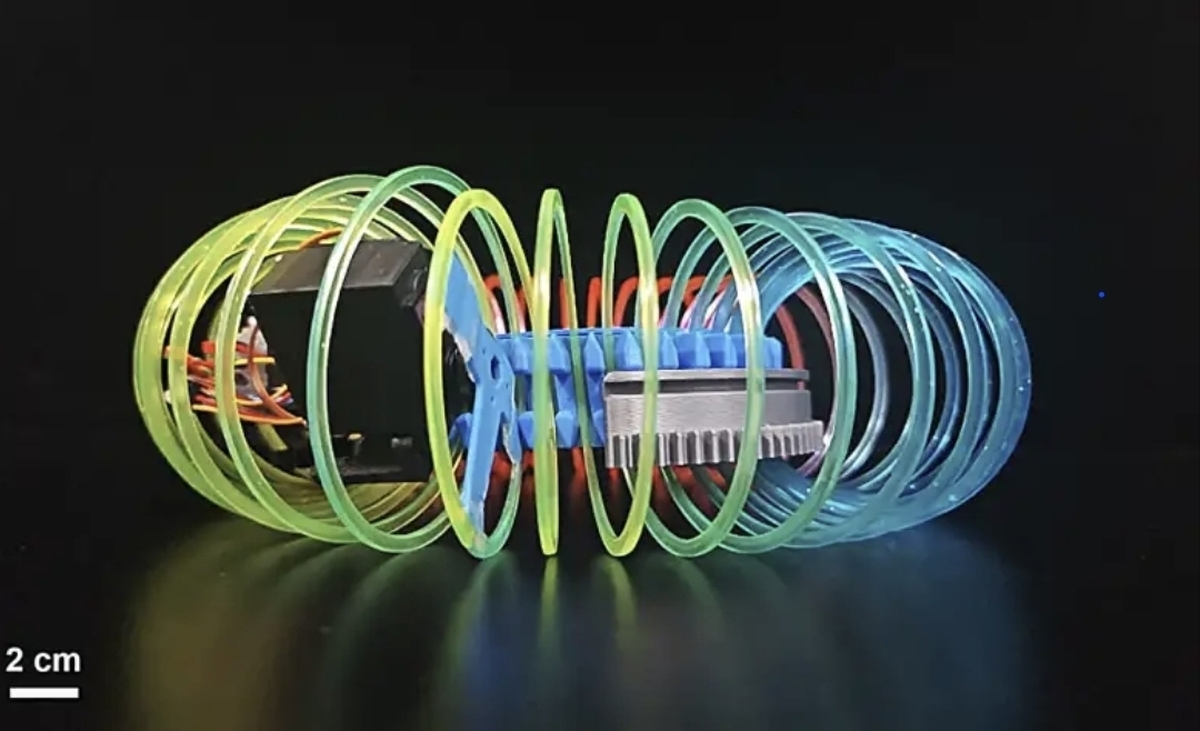
مهندسان دانشگاه کالیفرنیا در برکلی موفق به ساخت ربات پرندهای الهامگرفته از زنبور عسل شدهاند که با کمتر از یک سانتیمتر عرض و تنها ۲۱ میلیگرم وزن، توانایی پرواز کنترلشده، تغییر جهت و هدفگیری دقیق را دارد. این ربات کوچکترین ربات بیسیم پرندهای است که تاکنون ساخته شده است.
لیوی لین، استاد ممتاز مهندسی مکانیک در دانشگاه UC Berkeley و نویسنده ارشد این پژوهش، درباره تواناییهای منحصربهفرد این ربات گفت: «زنبورها تواناییهای شگفتانگیزی در پرواز دارند؛ از جمله ناوبری، معلق ماندن در هوا و گردهافشانی؛ که رباتهای پرندهای در این مقیاس هنوز نتوانستهاند آنها را بهدرستی تقلید کنند. این ربات پرنده بیسیم میتواند مانند زنبور به هدف خاصی نزدیک شده و به آن برخورد کند؛ مشابه مکانیزم گردهافشانی که زنبور هنگام جمعآوری شهد انجام میدهد.»
مقاله علمی مربوط به این دستاورد روز جمعه، ۲۸ مارس ۲۰۲۵ در نشریه معتبر Science Advances منتشر شده است.
پیشرانش مغناطیسی؛ راز پرواز ریزمقیاس
یکی از چالشهای اصلی در ساخت رباتهای پرنده کوچک، تأمین انرژی و تعبیه سامانههای کنترلی در ابعاد بسیار کوچک و وزن سبک است. برای غلبه بر این چالش، تیم تحقیقاتی دانشگاه برکلی از میدان مغناطیسی خارجی بهعنوان منبع نیرو و ابزار هدایت پرواز استفاده کردهاند.
یه گزارش ساینس دیلی، ربات مورد نظر به شکل یک پروانه کوچک طراحی شده که دو آهنربای کوچک در ساختار آن تعبیه شده است. با اعمال میدان مغناطیسی خارجی، این آهنرباها دچار کشش و دفع متناوب میشوند که باعث چرخش پروانه و در نهایت تولید نیروی برآیند کافی برای پرواز میشود. مسیر پرواز ربات نیز با تغییر شدت میدان مغناطیسی قابل کنترل دقیق است.
این ربات با قطر کمتر از یک سانتیمتر، در مقایسه با کوچکترین ربات پرنده مشابه دیگر که قطر ۲.۸ سانتیمتری دارد، تقریباً سه برابر کوچکتر است.
کاربردهای بزرگ برای فناوری بسیار کوچک
فانپینگ سوی، از نویسندگان اول این مطالعه که بهتازگی دوره دکتری مهندسی را در UC Berkeley به پایان رسانده، در توضیح کاربردهای احتمالی این ربات گفت: «رباتهای پرنده کوچک میتوانند برای بررسی حفرههای باریک یا محیطهای پیچیده مورد استفاده قرار گیرند. این فناوری پتانسیل کاربرد در گردهافشانی مصنوعی یا بازرسی فضاهای کوچک مانند داخل لولهها را دارد.»
در حال حاضر، این ربات فقط قادر به پرواز منفعل است؛ یعنی برخلاف هواپیماها یا پهپادهای پیشرفتهتر، حسگر داخلی برای شناسایی موقعیت یا مسیر پروازی ندارد و نمیتواند در لحظه مسیر خود را تنظیم کند؛ بنابراین اگر تغییری ناگهانی در محیط ایجاد شود، مانند وزش باد شدید، ممکن است مسیر پروازی آن منحرف شود.
وییو، دانشجوی تحصیلات تکمیلی در آزمایشگاه لیوی لین و نویسنده همکار این مقاله میگوید: «در آینده تلاش خواهیم کرد سامانه کنترل فعال را به این ربات اضافه کنیم تا بتواند در لحظه موقعیت و زاویه خود را تغییر دهد.»
گامی به سوی رباتهای هوشمند و گروهی
یکی از الزامات فعلی برای بهکارگیری این ربات، وجود یک میدان مغناطیسی قوی است که از طریق سیمپیچ الکترومغناطیسی تولید میشود. با این حال، پژوهشگران امیدوارند که در آینده با کوچکتر کردن ابعاد ربات به کمتر از یک میلیمتر ــ تقریباً به اندازه یک پشه ــ بتوان از میدانهای مغناطیسی ضعیفتر مثل امواج رادیویی برای هدایت آن استفاده کرد.
تیم تحقیقاتی لیوی لین همچنین موفق به ساخت رباتی الهامگرفته از سوسک شدهاند که توانایی حرکت سریع بر روی زمین را دارد و حتی میتواند زیر فشار پا دوام بیاورد. علاوه بر این، وییو در حال توسعه رباتهایی به اندازه ۵ میلیمتر است که قادرند حرکتهای مختلفی همچون خزیدن، چرخیدن و شکلدهی به آرایههای گروهی انجام دهند.
وی در اینباره افزود: «من روی رباتهایی به اندازه ۵ میلیمتر کار میکنم که میتوانند بخزند، بچرخند یا زنجیرهوار به هم متصل شوند تا وظایفی را انجام دهند که برای یک ربات بهتنهایی ممکن نیست. این فناوری میتواند در جراحیهای کمتهاجمی نیز به کار رود؛ زیرا میتوان تعدادی از آنها را به درون بدن تزریق کرد و بهصورت گروهی برای ایجاد استنت، از بین بردن لختههای خونی یا انجام سایر اقدامات درمانی استفاده کرد.»
انتهای پیام/



برنا گزارش میدهد؛



انقلاب در تعامل انسان و رباتها؛






نظر شما

پیشنهاد سردبیر












پرونده ویژه







